#include <stdio.h>Include dependency graph for cframe.h:
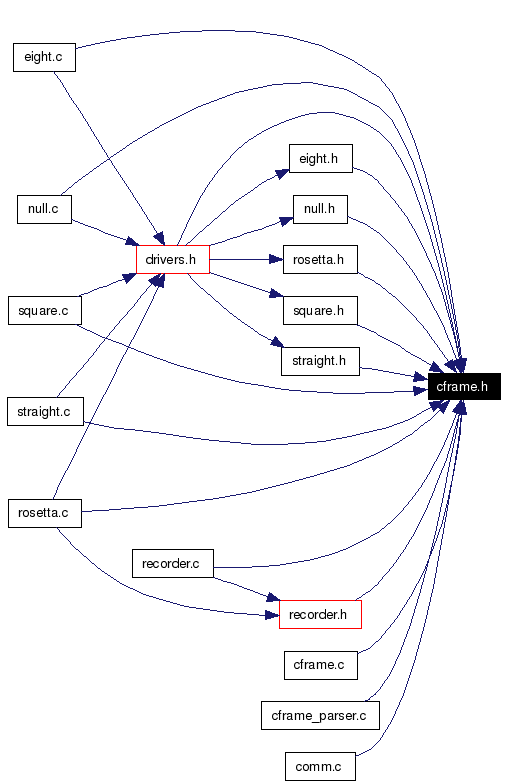
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Data Structures | |
| struct | cframe |
| A structure for containing communication frames. More... | |
Typedefs | |
| typedef cframe | cframe_t |
| A structure for containing communication frames. | |
Functions | |
| int | cartcomm_decode_msg (cframe_t *cf, char *inMsg) |
| Decode the message into a control frame. | |
| int | cartcomm_encode_msg (cframe_t *cf, char *outMsg) |
| Encode the control frame as a message string. | |
| void | print_cframe (FILE *file, cframe_t *cf) |
| Print a control frame in a human readable form. | |
|
|
A structure for containing communication frames.
Referenced by cartcomm_decode_msg(), cartcomm_encode_msg(), cartcomm_synchronize(), drive(), driver_eight(), driver_null(), driver_rosetta(), driver_square(), driver_straight(), parse_avpair(), parse_msg(), print_cframe(), recorder_add(), and recorder_export(). |
|
||||||||||||
|
Decode the message into a control frame.
Definition at line 126 of file cframe.c. References cframe_t, cframe::checksum, DEBUG2, DEBUG3, cframe::msg_len, and parse_msg(). Referenced by cartcomm_encode_msg(), cartcomm_synchronize(), and drive(). |
Here is the call graph for this function:

|
||||||||||||
|
Encode the control frame as a message string.
Definition at line 43 of file cframe.c. References APPEND, ASSERT_EQUAL, cartcomm_decode_msg(), cframe_t, cframe::cmd_irad, cframe::cmd_mode, cframe::cmd_speed, cframe::cur_irad, cframe::cur_mode, cframe::cur_speed, cframe::cur_throttle, DEBUG3, deg_to_nmea(), cframe::error_code, cframe::gps_epe, cframe::gps_lat, cframe::gps_lon, cframe::gps_speed_east, cframe::gps_speed_north, cframe::gps_status, cframe::seqno, cframe::speed_limit_error, cframe::status, cframe::steer_limit_error, and cframe::timestamp. Referenced by drive(). |
Here is the call graph for this function:

|
||||||||||||
|
Print a control frame in a human readable form.
Definition at line 161 of file cframe.c. References cframe_t, cframe::cmd_irad, cframe::cmd_mode, cframe::cmd_speed, cframe::cur_irad, cframe::cur_mode, cframe::cur_speed, cframe::cur_throttle, cframe::error_code, cframe::gps_epe, cframe::gps_lat, cframe::gps_lon, cframe::gps_speed_east, cframe::gps_speed_north, cframe::gps_status, PRINT, cframe::seqno, cframe::speed_limit_error, cframe::status, cframe::steer_limit_error, and cframe::timestamp. |
 1.3.9.1
1.3.9.1