|
| ||||
| dec 11 2009 12:00 hrs | GO | Friday: Caleb says he will take ERTS to the test field at 13:30 today. | [NWS] | |
P545 Project Field Trials
The Computer Science Embedded & Real-Time Systems course will hold field trials demonstrating this year's class project, autonomous GPS navigation with obstacle avoidance, for a computer controlled vehicle. Anyone interested in observing the trials, learning about the vehicle, or the subject of embedded systems is encouraged to observe and speak with the participants.
|

Photo by Hillary Demmon |
![[MAP]](../img/test-field-map.gif){kind=link}
About the Trials
ERTS is a computer controlled golf car supporting research and
instruction in the School of Informatics. Development of its
systems for navigation and control is an ongoing project in the
P545 course.
ERTS's sensory array includes
The field trials have the following components:
Evaluation Criteria (in decreasing order of importance):
|
|
What You Will See
 For safety, ERTS always has a Test Driver seated behind the
steering wheel.
The Test Driver can abort a trial and override computer control
should conditions require it. Otherwise, the Test Driver
does not touch the steering wheel, brake pedal, or accellerator
once the trial has started.
For safety, ERTS always has a Test Driver seated behind the
steering wheel.
The Test Driver can abort a trial and override computer control
should conditions require it. Otherwise, the Test Driver
does not touch the steering wheel, brake pedal, or accellerator
once the trial has started.
Each Experimenter in turn will perform their first trial. Once all systems have been tested, additional trials are done in a first-come first-served basis.
Trials
- Exprimenters load and start their navigation (NAV) systems on ERTS's on-board computer network, then leave the vehicle.
- During initialization, NAV reads a list of GPS waypoints that define the trial's course.
- The Test Driver releases ERTS for computer control.
- A trial consists of three laps through the course. On the first lap, NAV traverses the course encountering obstacles along the way. It must steer ERTS around these obstacles as it moves between waypoints.
- On the second and third laps, NAV knows the positions of obstacles it has seen. Thus, it can now do some advance planning, enabling it to traverse the course more efficiently and faster.
- NAV should try to coast ERTS to a stop within the final waypoint (no brakes).
About ERTS
 The E&RT laboratory is a golf car modified for computer control.
The initial instructional implementation was developed by members
of the Computer Science Department's Faculty and Technical Staff.
As they are learning learning embedded-system concepts and design methods,
E&RT students are assigned to solve guidance problems such as GPS navigation
and obstacle avoidence.
The E&RT laboratory is a golf car modified for computer control.
The initial instructional implementation was developed by members
of the Computer Science Department's Faculty and Technical Staff.
As they are learning learning embedded-system concepts and design methods,
E&RT students are assigned to solve guidance problems such as GPS navigation
and obstacle avoidence.
As higher functionality develops over time, the E&RT lab vehicle is targetted for future research in two primary areas:
- Embedded Systems Research. Principles, methods, and tools advancing the practice for systems containing purpose-specific software. This broad range of applications includes robots, vehicles, ``smart'' appliances, hand-held communications and media devices, to name just a few.
- Situated Intelligence and Learning. Intelligent systems are expected to function in ever more more sophisticated ways, adapt to changing conditions, and even learning how to perform better. Development is aimed at providing a flexible platform for experimental research in artificial intelligence, computer cognition, and on-the-fly adaptation.
About GPS Navigation
 The Global Positioning System is an array of low-orbit satellites
broadcasting positioning information world-wide. A GPS sensor is
a device that calculates its lattitude, longitude, and altitude
by ``triangulating'' signals from some of these satellites.
The Global Positioning System is an array of low-orbit satellites
broadcasting positioning information world-wide. A GPS sensor is
a device that calculates its lattitude, longitude, and altitude
by ``triangulating'' signals from some of these satellites.
A course is a list of GPS waypoints, containing a target postion, and an accuracy radius (how close is close enough). The navigation problem is to steer the vehicle through these waypoints in the order given by the course. The vehicle Navigator (NAV) is a program that samples the GPS sensor at regular intervals and adjusts the vehicle's heading and speed to guide it through the waypoints. |
The Corridor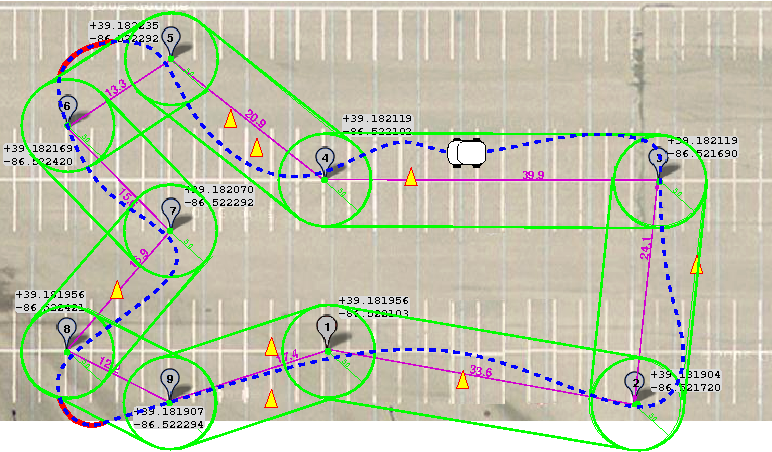 The course boundary is defined by lines connecting the waypoints as
illustrated to the right. A vehicle is not required to "hit"
the waypoint's GPS coordinates but rather to stay within
this course "corridor."
The course boundary is defined by lines connecting the waypoints as
illustrated to the right. A vehicle is not required to "hit"
the waypoint's GPS coordinates but rather to stay within
this course "corridor."
|
Path Planning Like a human would, better navigation
software will perform maneuvers that anticipate the pattern of waypoints
that lie ahead. For example, it might swing a bit to the right in
anticipation of a sharp left turn, or slow down when approaching
an S-curve. The vehicle path shown here is an illustration of
poor planning; although the vehicle passes close to each
waypoint, an ``intelligent'' navigator would plan a more
elegant path through the course.
Like a human would, better navigation
software will perform maneuvers that anticipate the pattern of waypoints
that lie ahead. For example, it might swing a bit to the right in
anticipation of a sharp left turn, or slow down when approaching
an S-curve. The vehicle path shown here is an illustration of
poor planning; although the vehicle passes close to each
waypoint, an ``intelligent'' navigator would plan a more
elegant path through the course.
|
About Obstacle Avoidance ERTS's obstacle sensor is a Laser Detection and Ranging (LADAR)
device that sweeps a laser beam from side to side, measuring the
reflection time to estimate a distance to the reflecting object.
From this and other information, NAV computes the bearing of the
obstacle, initiating a steering action if necessary to avoid it.
ERTS's obstacle sensor is a Laser Detection and Ranging (LADAR)
device that sweeps a laser beam from side to side, measuring the
reflection time to estimate a distance to the reflecting object.
From this and other information, NAV computes the bearing of the
obstacle, initiating a steering action if necessary to avoid it.
|
© Steven D. Johnson and The Indiana University Trustees